1. Introduction
umbers of robots & wireless communication protocols are increasing day by day. But most of the communication protocols are complex and only valid for short distance communication. Keeping it in mind that communication between robots should not be bounded by area or should not be bounded by number of nodes we have implemented this project. In this project we have implemented a way of communication between robots by DTMF (Dual-Tone Multi-Frequency) and atmega8 microcontroller. As humans call to one another robots will generate call and send data through DTMF. Lots of research work has been published on DTMF control system. Yun Chan Cho and Jae wook Jeon [1] used DTMF of mobile phone. D. Manojkumar et.al. [2] controlled a robot by a mobile using DTMF tone. To control domestic systems DTMF has been used [3]. Smart phones also have been used to control mobile robots [4]. Human-Robot interaction mechanisms that allow a human commander to control a mobile robot via cellular phone have been developed and successfully tested by Ali Sekmen et.al. [5] and T. Kubik et.al. [6].
Tho Nguyen and Linda G. Bushnell have implemented DTMF communication For Robots using DTMF transceiver [7]. But all of them are used as limited using DTMF tone we have implemented complete ASCII chart. Communication between robots can be initiated from any one anytime. First robot will generate the call and receivers mobile will remain in auto receive mode.
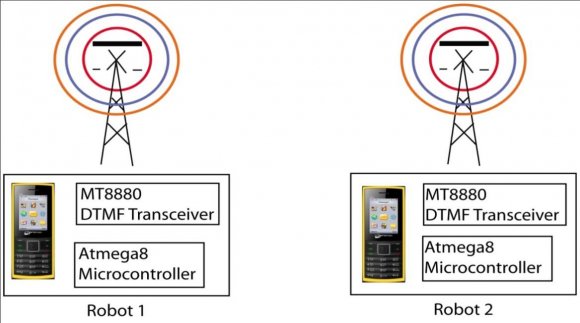
After receiving the call both the robot will start sending DTMF tones to communicate. Both the robots will use DTMF transceiver. From transmitting side the ASCII value of information will be encoded and transmit through DTMF tone. Receiver side will receive DTMF tone and decode it into ASCII value. As both the robots are using DTMF transceiver they can transmit or receive data during the course of a call. But this is a half duplex communication system. ATmega8 is used to encode information into DTMF digits, MT8880 DTMF transceiver will receive the digits and generate DTMF tones and Mobile will transmit the tone. At receiver end Mobile will forward the tone to MT8880 transceiver and it will decode DTMF tone. From the transceiver Microcontroller will receive 4 bit data and it will decode these data into ASCII value. The figure below describes DTMF communication between two robots. First robot consists of DTMF transciever, microcontroller and a mobile. Second robot also consists of same parts.To stablish a communication microcontroller makes a call through cell phone. But data is sent to DTMF transciever from microcontroller for encoding. Communication between microcontroller and DTMF transciever is bidirectional. DTMF transciever encode it and transmit dual tone to cell phone. Communication between cell phone and transciever is also bidirectional. In recieving mode transciever recieve tones from mobile and decode it to microcontroller. The delay to stablish a communication depends on the delay of call generation and connection establishment.
Communication establishment time between two robots under one operator takes less time than different operators. In this communication good network connection is required to avoid data loss. controlling signal. Only 9 buttons has been used just to control relay, cars or communicate etc. In our project If any robot finds another robot busy or waiting, it will generate call again after 5 minutes by default.
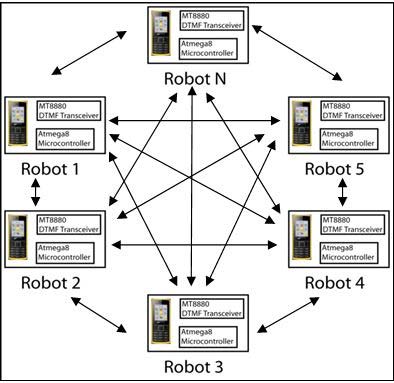
In this communication protocol robots can establish a fully connected network.Any robot can communicate with any robot anytime.
2. Circuit Description
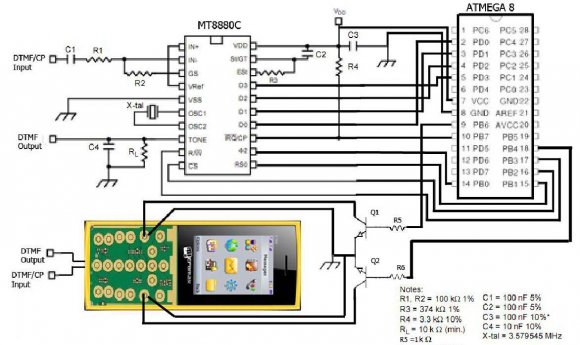
MT8880C is the DTMF transceiver and Atmega8 is the microcontroller used in this circuit. Both the IC is given +5v power input. MT8880C takes DTMF input by pin IN-& GS. And gives DTMF output by pin Tone. TTL Data pins from D0 to D3 are connected with PD0 to PD3 of atmega8. Some control pins like IRQ_bar, RS0, CS_bar, R/W_bar etc are connected with PORTB GPIO pins. PB6 and PB4 pins are connected to the base of BC548 transistors. In each keypad button there are two circles. The outer circle of the button work as negative terminal and the inner circle of the button work as positive terminal [9]. When the positive and negative terminal is shorted corresponding button works as pressed. In this circuit two transistors are connected with two buttons of mobile those are accept & reject buttons. When any voltage is passed through the base of transistor, two terminals of the button gets shorted and the button is pressed.
To transmit any information at first 1 st robot initialize a call sending voltage to PB6 pin twice. At first press, mobile goes to its dialed list and at second press it initiate a call to the last dialed number. Desired robots number can be saved in dialed list manually or we can connect more 10 transistors to 0 to 9 buttons of mobile. And these 10 buttons can be controlled by microcontroller to press a new number.
At 2 nd robot terminal mobile is in auto receive mode. Transmitting microcontroller checks that receiver accepted or rejected the call through sending start bits.
When robot 2 receives start bits it sends back acknowledge bits and robot1 starts to send information in DTMF tones. Microcontroller sends data through PD0 to PD3 and MT8880C converts the data into DTMF tone. Trough microphone of mobile DTMF tones is transmitted. At receiving terminal Mobile receive the tone and transmit the tone to MT8880C through speaker.MT8880C converts the tone into 4bit data and send the data to microcontroller. If robot2 wants to communicate it also sends start bits and after getting acknowledges bits it starts transmission. When robot2 finish sending data it sends terminate bits. When robot1 also sends terminate bit both the microcontroller send voltage to PB4 bit and terminate the call.
The circuit Diagram of this system consists of the following equipments: a) Mobile:
Our goal is to establish long distance communication between robots. DTMF tones are our information data. To transmit & receive DTMF tones from long distance we have used mobile phones. And also to initialize or receive a call mobile is the easiest and simplest way to perform the task. As mobile phones are portable both stationary and mobile robots can use mobile phones.
3. b)
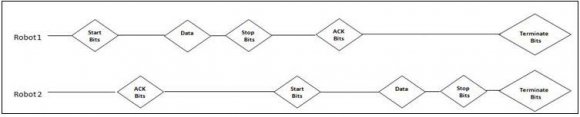
The MT8880C is a monolithic DTMF transceiver. It is fabricated in Mitelís ISO2-CMOS technology, which provides low power dissipation and high reliability [8]. This IC can be interfaced with microcontroller easily. M2M: GSM Network for Robots using DTMF Before transmitting each digit MT8880C makes strobe pin high. which indicates that one tone is available for input. This tone certainly helps to reduce errors detecting zero or repeated tones. Some of the ASCII values are reserved for specific use. Like to indicate start bits robots use 0x00,0xEE is used as acknowledge bits.This acknowledge bits helps a robot to understand the call is received or not. To terminate a call robots use terminate bits 0xDD.If both the robots send terminate bits means there are no more data to transmit or receive. Both the robots terminate the call pressing no button in mobile. The timing diagram is shown here is after call has established between two robots. Robot1 has send start bits 0x00 then robot2 has replied acknowledge bits 0x06. After receiving robot1 sends end bits 0xFF. When both the robots completed their communication they confirm it sending terminate bits 0xFE.
IV. In this experiment we have used Arduino instead of atmega8 for easy prototyping. These two microcontrollers are almost same in operation. Here robot1 transmitted "Hello! It's fun".Robot1 generated the call through shorting yes button twice as number of robot2 was the last dialed number in phone list, a call initiated to robot2. Robo t1 transmitted start bits 0x00 and robot2 resend acknowledge bits 0xEE. Robot1 starts transmitting data through DTMF. Tones for "Hello! It's fun" are " 48 65 6C 6C 6F 21 90 69 74 27 73 90 66 75 6E". Robot2 received these tones, decoded it and displayed in LCD. Then robot2 transmitted terminate bits 0xDD. Robot1 confirms there is no more data for transmission and resend 0xDD. Both the robots shorted 'NO' button of mobile and terminated the call.
4. Hardware Implementation

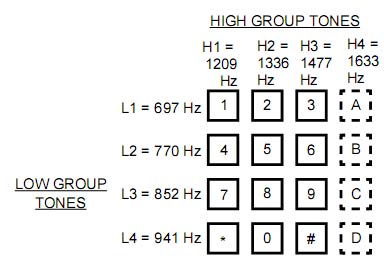
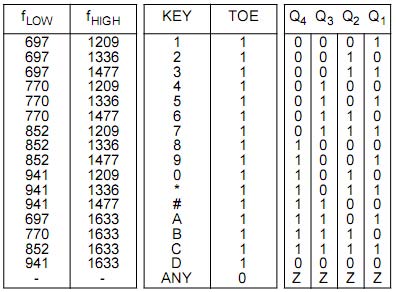
![obal Journal of Researches in Engineering Gl © 2013 Global Journals Inc. (US) M2M: GSM Network for Robots using DTMF DTMF Transceiver: Internal counters provide a burst mode such that tone bursts can be transmitted with precise timing. Digit sequence consists of all 16 DTMF tones & all 16 tone pairs decode them into 4bit BCD code. Tone duration=40 ms. Tone pause=40 ms. error rate of less than 1 in 10,000 [8]. c) Atmega8 Microcontroller: Brain of this project is Atmega8 micro-controller. It is a 8 bit Micro controller with RISC architecture. Its speed is up to 16MIPS throughput at 16MHz. It has 8K bytes of flash and 512bytes EEPROM. Operating voltage 2.7v -5.5v, in active mode it consumes only 3.6mA & in sleep mode it consumes less than 1uA current [10] which made it a perfect choice for this project. III. Main Technology used a) DTMF Tone: DTMF generation is a composite sinusoidal signals of two tones between the frequency of 697Hz and 1633Hz [11]. The DTMF keypad is arranged such that each row will have it's own unique tone frequency and also each column will have it's own unique tone. Below is a representation of the typical DTMF keypad and the associated row/column frequencies.](https://engineeringresearch.org/index.php/GJRE/article/download/863/version/101304/5-M2M-GSM-Network-for-Robots-using-DTMF_html/27954/image-6.png)
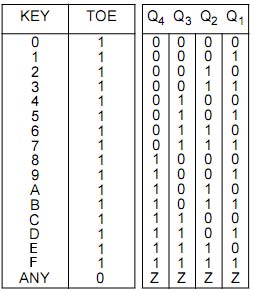
![Figure 5 : DTMF frequency when one digit is pressed b) Interface between MT8880C & Microcontroller Write cycle consists of the following steps (starting with the MT8880's CS pin high to deselect it) [12]: 1) Put the data pins into output mode 2) Write the data to the bus 3) Set up RS0: 0 = write data; 1 = write instructions 4) Clear the RW bit to request a write 5) Clear CS to activate the MT8880 6) Set CS to terminate the write operation and deactivate the MT8880. Reading the MT8880 is similar. Starting with CS high, the steps are: 1) Put the data pins into input mode 2) Set the RW bit to request a read 3) Set up RS0: 0 = read data; 1 = read instructions 4) Clear CS to activate the MT8880 5) Read the data from the bus 6) Set CS to terminate the read operation and deactivate the MT8880.](https://engineeringresearch.org/index.php/GJRE/article/download/863/version/101304/5-M2M-GSM-Network-for-Robots-using-DTMF_html/27956/image-8.png)

| 013 |
| 2 |
| Year |
| 27 |
| I |
| Volume XIII Issue X Version |
| ( ) |