1. Introduction
obotic technologies are advancing in the field of minimally invasive surgery. The last decade, more than 1.5 million laparoscopic surgical procedures, including gynecologic, cardiac, urology, thoracic, and general surgery, have been performed by daVinchi (Intuitive Surgical Incorporation) [1]. In contrast to daVinchi by Intuitive Surgical Incorporation and Zeus by Computer Motion [2] which instruments are designed for manipulation and video observation this paper describes novel instrument for therapy with application in minimally invasive surgery. The aim of the work is design of a compact, convenient, simplified, better possibilities and suitable price devices thereby and the small hospitals to have accesses to this systems and patient benefit from it Our ultimate aim is radical improvements to the quality and efficiency of our healthcare.
Major diseases of gallbladder are gallbladder stones and carcinoma. Gallbladder and bile duct carcinoma are rare diseases of the biliary tract.
Correctly function of gallbladder is essential to the digestive process. When gallbladder cancer is caught early, removing a gallbladder or part of the bile duct may eliminate all the cancerous cells. Gallbladder cancer does not have any proven prevention methods. The causes of the disease, such as gallstones, cannot be prevented from forming in the gallbladder. Two main types of gallbladder cancer tumors are typical, adenocarcinoma and non-adenocarcinoma. There is a lot of methods for diagnostics of gallblader carcenoma: Blood tests, Ultrasound Computerized tomography (CT) scan, Magnetic resonance imaging (MRI) Endoscopic retrograde cholangio pancreatography (ERCP) Biopsy, Laparoscopy, and etc. Tumors tend to be harder than the surrounding tissue, and not possible indicate their presence, size and exact location without tactile sense when diagnostics is performed by laparoscopic procedure. Many gallbladder cancers are discovered after a laboratory examination of a gallbladder that's been removed for other reasons.. Several researchers have also incorporated a direct sensing method for tissue characterization through pressure measurement normal to the surface of the jaws [ 3] or incorporated the sensors into the handle of the robot instrument [4 ], [5] We offer family instruments for Therapeutics tasks which is described at the following section.
II.
2. An Instrument for Therapeutics Tasks
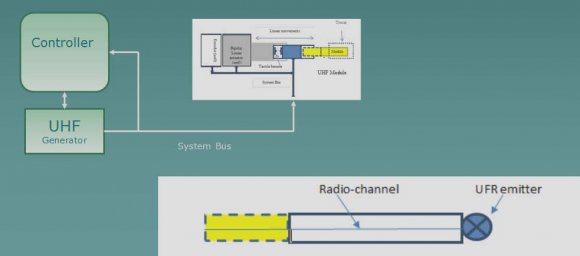
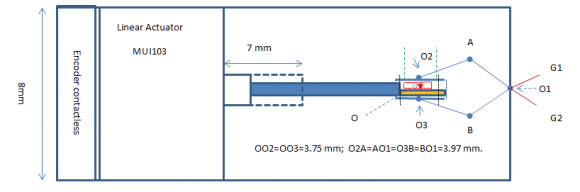
On the Fig. 1 is shown a basic structure of the instrument for therapy in laparoscopy. We are applied the construction and principle of the work which is described at [6]. The main elements of the instrument are a step motor by PrimoPall [7], incremental contactless encoder, a force sensors by Honeywell An instrument for a therapy (On Fig. 2) is a sophisticated module that incorporates engines, sensors for positioning and control of encoders and mechanical structures that perform manipulation on tissues (laparoscopic interventions). It is coupled on the top of the Basic platform slider, having three degrees of freedom: translation, rotation, and jabbing between the jaws and been controlled by Controller.
3. Fig. 2: An instrument for mechanical therapy b) An instrument for RF therapy
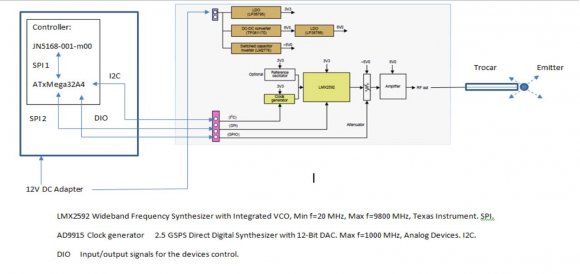
This instrument is designed for programmable tissue exposure in the frequency range from 0 Hz to 500MHz or 40MHz ?? 8 GHz. The irradiation is local. A programmed change in the intensity and frequency of the radio signal is a function of time. Main Idea is to transport the end of the tool where is embedded UFR emitter and therapy to be executed locally.
The instrument uses an UHF Generator that generates a programmed frequency, forms the required radio signal through the output stage, and outputs it to an emitter to perform radiotherapy via a wired channel. The linear displacement of the module and its positioning at a set point is provided by the main step
4. Electronics Interfaces Board
The electronic interfaces board is twoprocessors system, including wireless JN5168-001-M00 and industrial ATxMega32A4. The microcontroller JN5168-001-M00 works as a network device in local wireless network and a processor for control of different incorporated electronic modules simultaneously. ATxMega32A4 works as slave coprocessor and is responsible for the encoder's data processing and radio-therapy controlling.
5. a) Image processing
Tumors tend to be harder than the surrounding tissue. Inicially image processing is performed to get some idea of presence, size and exact location of different tissues. [10]. For example, we are using the laparoscopic image in a 65-year-old man. The procedure of image processing involves the following steps: Looking at the image we notice that the tumor has a darker (lighter) color. This shows us that we must choose a feature of segmentation of the image intensity threshold. After image segmentation with different thresholds we can calculate the size (area) of whole gall and size of healthy part. We calculate the size by expression:
) 1 )( 1 ( ) 1 )( 1 1 1 ( y n y x n x i y i y i x n i i x S + ? + + + + ? ? = = ? Where ) , (i6. Quantitative Assessment of Gallbladder Carcinoma by Image Processing
7. Experiments and Analyzes
After image processing we perform experiments and analyses. The purposes of carried out experiments are to verify the functionality and working capacity of the tools, to evaluate practically whether the error introduced by the proposed module during its normal operation is well within the required target, to demonstrate the operation of the tools
The experiment includes a search in the work area for a deviation with a set force value. It is shown in the red graphic. The blue graph shows the frequency of the generated RF signal used to irradiate the subject.
When the deviation is detected, the formation of the micro steps is terminated and the generator starts operating in accordance with the set program. Upon reaching the set frequency, in the case of 434 MHz, radiation is maintained at the set frequency and intensity for the time defined by the therapy program -in this case 10 seconds. After that, the generator turns off and the frequency drops to the minimum.
The number of the micro steps is located along the X axis, along with the time in units of 100 ms.
100 ms is the time to take 1 micro step. Along the Y axis is located the power in grams, along with the frequency of the irradiation signal in megahertz.
8. Conclusions and Intentions
for Future Work
This paper discussed design and development of family instruments for therapeutics tasks with application of minimally invasive surgery. There are proposed an electronics interfaces board whish includes a block diagram of Controller, a block diagram of microcontroller JN5148-01-M00 and a block diagram of microcontroller ATxMega32A4. They are conducted an experiment to demonstrate a principle of the work of the instruments. Our intention for future work includes some experiments which have to be conducted with various frequency and intensity, and different materials of similar properties of human tissues in order to compare the results.



![Fig. 5: Block diagram of Controller The control module includes as coprocessor microcontroller ATxMega32A4. Its architecture is shown on the Fig 6.This microcontroller is responsible for the encoders data processing and radio-therapy controlling. JN5168-001-M00 and ATxMega32A4 [9] ate connected between using on board SPI bus (primary).ATxMega32A4 is controlling the frequency generator module using embedded secondary SPI and I2C busses On Fig.6is shown Block diagram of JN5168-001-M00 architecture.](https://engineeringresearch.org/index.php/GJRE/article/download/2055/version/101487/2-A-Basic-Platform-and-Electronics_html/32001/image-6.png)

![Preliminary image processing; 2. Image Segmentation; 3. Defining and measuring the features of image; 4. Classification of objects in the image. Preliminary image processing includes procedures which increase the image quality and prepare suitable images for the next steps. Image segmentation as procedure for separating the image objects from one other and from background -10. There are different approaches for image segmentation: Colorbased segmentation, texture segmentation, contour segmentation [15], [16] etc. Defining the features of the image is a basic step in image processing. Be the features image is classified in groups.](https://engineeringresearch.org/index.php/GJRE/article/download/2055/version/101487/2-A-Basic-Platform-and-Electronics_html/32003/image-8.png)