1.
Abstract-This paper presents a novel approach population based metaheuristics algorithm known as Quasi Oppositional Passing Vehicle Search (QOPVS) algorithm for solve the Unit commitment problem (UCP) of thermal units in an electrical power system. Passing vehicle search (PVS) algorithm is a population based algorithm which mechanism is inspired by passing vehicles on two-lane rural highways. As algorithms are population based so enables to provide improved solution with integration of powerful techniques. In this article, such a powerful technique named Opposite based learning techniques (OBLT) is integrated with proposed PVS algorithm.
OBLT provides enough strength to proposed PVS algorithm to gain a better approximation for both current and opposite population at the same time, as it provide a solution which is more nearer solution from optimal based from starting by checking both solutions. Thermal unit scheduling problem is a nonlinear, non convex, discrete, complex and constrained optimisation problem. To verify the effectiveness of the proposed QOPVS algorithm is applied to some standard benchmark test function and various IEEE test systems with the number of thermal units 5-, 6-, 10-, 20-, and 40-unit in a 24-hour load scheduling horizon. The results show an improvement in the quality of solutions obtained compared with other methods results in the literature. The proposed algorithm is considerably fast and provides feasible nearoptimal solutions. Simulations results have proved the performance of the proposed QOPVS algorithm to solving large UC problems within a faster convergence and reasonable execution time.
Introduction n general, real world problems are complex and nonlinear so it is a very difficult task to find out its solution. Optimization stands with every person wants to maximize its outcomes with its least possible utilization of resources. World surround us is a lot of natural behaviors for performing various task. Although the target of all individuals is to be survive, helping each other and working in a group. Basic theme of every meta-heuristic algorithms is come from natural incidents happening around us. Now a day, engineering optimization is in its third generation of algorithms/techniques. In the first generation in early 1960s some mathematical techniques or deterministic techniques [1]- [3] are proposed like Linear programming (LPs), gradient based algorithm etc. to solve various engineering design problems. Advantages associated with deterministic technique is that they are less time consuming to find a solution, but disadvantage [4] is that they will not guarantees that a solution achieved with them is an optimal one. With first generation algorithms, there is high possibility to trap in local minima/maxima rather finding global optimal solution. Second generation of algorithms are problem specific algorithms and also their functionality depends on the initial guess of the solution, so these algorithms (simulated annealing) also need problem specific man power. These algorithms are also known as heuristic techniques.
Third generation of algorithms are known as meta-heuristic, improved heuristic techniques or evolutionary algorithms. This type of stochastic algorithms are basically population based or fitness oriented. These algorithms are basically inspired from natural activities incidents around us. Some of the natural behaviors are herding, migration, hunting, defending, navigation etc. The strength of meta-heuristic algorithms is based strongly on randomly generated initial solutions. Meta-heuristics algorithm consists of many solutions at each stage according to their fitness. So, there is almost negligible probability of entrapping in the local solution and higher probability of getting global optimal solution. Meta-heuristic techniques are also called direction search towards global best solution. As after each iteration solution of all individual are processed through sorting from higher quality solution to lower quality solutions. So, this technique is more efficient than other techniques. Meta-heuristic techniques are also integrated with some 'intelligence' or adaptive capability to converge towards global best solution. Other advantage of these type of algorithms is that they are not problem specific algorithms, having capability of solving many problems with negligible change in their structural computational model also no need to be an expertise in problem specific domain, so provides researchers a greater flexibility to apply them to number of problems. Only disadvantage associated with them is that they cannot provide global best solution in single run so researchers need to test their robustness by considering multiple runs for single problem to determine their performance or effectiveness to solve it.
Sole objective optimization technique (SOOT) is to achieve "the best" solution, which either may be minimization or maximization value of a sole objective function with respective to all different objectives into one in the environment of various equality or inequality bound of decision variable parameters. So, SOOT increases the burden of decision making significantly on the shoulders of the researcher. Population-based metaheuristic techniques acquires a collection of solutions, called a population, to learn or optimize the problem in a parallel way. Population is a main principle of the metaheuristic techniques. Successful metaheuristic techniques have to be cautiously modelled without caring of the starting point, so there is negligible probability to visit each and every possible problem domain to get the feasible region.
The electric power demand is much higher during day time compare night time due to larger industrial loads, larger usage by residential-population during early-morning & evening. The unit commitment problem has been approached by many techniques but only acceptably solved by two techniques: dynamic programming and Lagrangian relaxation. The problem of thermal unit scheduling is due to the integer nature of the problem that a unit can either be off-line or on-line. The modeling of thermal power plants, for accurate scheduling, is complicated.
In the past, many optimization algorithms based on a gradient search for solving the linear and non-linear equation but in gradient search method value of objective function and constraint unstable and multiple peaks if problem having more than one local optimum. Population-based nature-inspiredis a meta-heuristic optimization algorithm have an ability to avoid local optima and get a globally optimal solution that makes it appropriate for practical applications without structural modifications in the algorithm for used in different constrained or unconstraint optimisation problems. In Fig. 1 over view of the proposed UC-ELD Problem is shown.
In their article, the total fuel cost obtained through the Quasi Oppositional Passing vehicle search (QOPVS) algorithm is similar to the cost obtained through Passing vehicle search (PVS) algorithm. In this work, the QOPVS algorithm is used to solve the UC with more focus towards the tuning of algorithmic control parameters, thus producing an optimal solution in terms of minimum generation cost and less execution time. In all the literatures reported, either the Unit Commitment or the Economic Load Dispatch problem is solved individually. In this work meta heuristics techniques is proposed to dispatch the committed units thus minimizing the fuel cost and making the application more suitable for practical generating systems. For experiment analysis, the outcome of the experimental results is compared in terms of optimal solution, robustness, computational efficiency and algorithmic efficiency.
In the following sections, we discuss the Unit Commitment problem, Problem formulation in single area Unit Commitment problem with different constraints, PVS algorithm, passing vehicles mechanism on two-lane rural highway, opposite based learning techniques (OBLT), quasi oppositional passing vehicle search (QOPVS) algorithm, numerical results of benchmark objective function and case study, and finally conclusion of our work.
2. II. Literature Survey Of Unit Commitment Problem
The most talked-about optimization techniques for the solution of the unit commitment problem (UCP)are: (i) Priority-list schemes, (ii) Dynamicprogramming (DP), & (iii) Lagrange algorithm (LA). Unit Commitment problem can be formulated as [5]- [25]: minimize generating cost and subject to many constrained such as (a) Minimum up and new down time constraints (b) Crew-constraints (c) Ramp-rate limits (d) Maximum and Minimum Power Limits (Generation limit constraints) (e) Generation ramp limit constraints (f) On/off line minimum level constraints (g) Transmission line constraints (g) Environmental constraints (h) Fuel limitation constraints (i) Unit hourly fuel mixing ratio constraints (j) Spinning reserve constraint (k) Power balance constraint (l) Deration of units (m) Unit status. Dynamic Programming Approach for Unit Commitment [5], A Unit Commitment Expert System [6], Fuzzy Dynamic Programming: An Application to Unit Commitment [7], Branch-and-Bound Scheduling for Thermal Generating Units [8], Unit Commitment Literature Synopsis [9] [10], A genetic algorithm based approach to thermal unit commitment of electric power systems describe in ref. [11]. A disadvantage of the GAs is that, since they are stochastic optimization algorithms, the optimality of the solution they provide cannot be guaranteed. Evolutionary Programming Based Economic Dispatch Units with Non-Smooth Fuel Cost Functions [12], Large scale unit commitment using a hybrid genetic algorithm [13], A Fuzzy Logic Approach to Unit Commitment [14], A Simulated Annealing Algorithm for Unit Commitment [15], A Genetic Algorithm for Solving the Unit Commitment Problem (UCP) of a Hydro-Thermal Power System [16], Unit Commitment with Transmission Security and Voltage Constraints [17], in ref., [18]- [29] UC and ELD problems with constraints are solved by different optimization techniques in power system.
During 2002, a fast solution technique for large scale Unit Commitment Problem using Genetic Algorithm is presented [30]. To reduce search space, unit integration technique is used and an intelligent mutation is performed using local hill-climbing optimization technique. A Genetic Algorithm Solution to the Unit Commitment Problem Based on Real-Coded Chromosomes and Fuzzy Optimization is implemented in [31]. They have reported that the fuzzy optimization had an impact on guiding the GA search and therefore assured finding a better fuel cost. A Particle Swarm Optimization approach to solve the economic dispatch considering the generator constraints is presented in [32]. Many nonlinear characteristics of the generator, such as ramp rate limits, prohibited operating zone, and non-smooth cost functions are considered in their method for practical generator operations. In ref. [33] attempted to explore the application of Economic Load Dispatch using Bacterial Foraging Technique with Particle Swarm Optimization based evolution. They showed that their technique had better information sharing and conveying mechanisms than other evolutionary methods including PSO, Bacterial Foraging (BF) and GA. In ref [34] [35] for ELD and UC problem by adding the regenerating population procedure in order to improve escaping from the local minimum. They employed a fuzzy decision theory to extract the best compromise solution.
Some of the most popular algorithms in this field are: Particle Swarm Optimization (PSO) [36], Differential Evolution (DE) [37], Evolutionary Programming (EP) [38] [39], Genetic Algorithms (GA) [40], [41], Ant Colony Optimization (ACO) [42]. Although these metaheuristic techniques are highly capable to provide promising solution for various challenging and real world design problems, But No Free Lunch theorem (NFLT) [43] permits researchers to propose new algorithms or to use an existing algorithm to improve the results of an existing problems. In Accordance to NFLT, all algorithms are effectively solving all optimization problems. So, one technique can be more efficient in solving a set of problems merely ineffective on another set of problems. This is the main reason for researchers to do more works in optimization area with a great zeal. Now some of the recently proposed algorithms in this field are: mimicking the social behavior based for different species like Monarch butterfly optimization (MBO) [44], Cuckoo Search (CS) algorithm [45], [46], Artificial Bee Colony (ABC) algorithm [47], Grey Wolf Optimizer (GWO) [48], Firefly Algorithm (FA) [49], [50], Cuckoo Optimization Algorithm (COA) [51]. Some physics based algorithms are like Ray Optimization algorithm (ROA) [52], [53], Colliding Bodies Optimization (CBO) [54], [55] algorithm with frequency constraint and discrete variable for truss bar design, Gravitational Search Algorithm (GSA) [56], Dolphin Echolocation (DE) [57], [58], Charged System Search (CSS) [59], [60] etc.
Further in the literature, we wish to add some recently proposed metaheuristic algorithms with different application in the well-recognized and reputed journals. Some of them are with various application like Trivedi, I. et al. with adaptive learning integrated with whale optimizer algorithm (AWOA) [61] in this article effectiveness of proposed work is tested on some standard test benchmark function. Well-recognized power system application that known as optimal power flow (OPF) problem is solved with different metaheuristic and hybrid metaheuristic technique [62], [63]. Another set of articles which consisting of popular power system application known as economic environment dispatch [64], [65], [66], and [67] considering problem such multi-objective as well as sole objective problem with and without renewable energy source involving various metaheuristic techniques comprising of different standard IEEE systems. This context also includes the improved version of popular krill herd technique like oppositional based krill herd [68], hybrid KH with quantum behaved PSO [69], improved KH [70] and stud krill herd algorithm [71].
3. III.
4. Unit Commitment Problem
In the electrical power system, it is expected to have power instantaneously and continuously available etc. meet customers' demands. The economic operation depends upon following function such as a load forecasting, unit commitment, economic dispatch, security analysis etc. [72]. An overall solution of these problems is providing a continuous and reliable supply of electricity while maintaining the optimal cost of production and operation for the system. Unit Commitment is the most importance problems in operational scheduling of electrical power generation. in this start up and shut down (ON/OFF) operation are also involved to meet load demand for a short time. The objective is to minimize total production to meet system demand and reserve requirements. The main aim of this research paper is the solution of the Unit Commitment problems. The recent time installing of large thermal units, complexity of power network and other environmental pollution has again need to find better solution or approach for determination of economicemission unit commitment schedule [73], [74]. In fig. 2(i) simple "peak-valley" load pattern is shown but fig. 2 (ii) Unit commitment schedule using shut-down rule is shown.
Based on the power requirements, the generating units are scheduled on an hourly basis for the next day's dispatch for the successive operating day. The system operators are able to schedule the On/Off status and the real power outputs of the thermal generating units to meet the total demand over a time horizon. There may exist large variations in the day to day load patterns, thus enough power has to be generated to meet the maximum load demand. In addition, it is not economical to run all the units every time. Hence it is necessary to determine the units of a particular system that are required to operate for given loads. The Economic Load Dispatch allocates power to the committed units thus minimizing the total generating/fuel cost. Constrained Economic Load Dispatch Problem is defined as the "The operation of generation facilities to produce energy at the lowest cost to reliably serve consumers, recognizing any operational limits of generation and transmission facilities". The two major factors to be considered while dispatching power to generating units are the cost of generation and the quantity of power supplied. The relation between the cost of generation and the power levels is approximated by a quadratic polynomial. To determine the economic distribution of load between the various generating units Year 2017 F in a power plant, the quadratic polynomial in terms of the power output is treated as an optimization problem with total cost minimization as the objective function, considering various constraints. The unit commitment problem can be solved by assigning priority for the generating units such that the most efficient unit is loaded first and then other units are loaded according to their efficiency. The security constraint unit commitment determines the generating unit schedules in a utility for minimizing the operating cost and satisfying the prevailing constraints such as a load balance, system spinning reserve, ramp rate limits, fuel cost constraints etc. The unit commitment problem is related to the class of complex combinational optimization problem. Unit Commitment can solve by finding the possible combination of the units and then select that combination which has the least operating cost between them but it required/consume a lot of time [75] [76]. Time-dependent start-up costs is shown in fig. 3.
5. Time of Day Time of Day
The total fuel cost over the given time horizon 'H' is
?????? = ?????? ? ????? ?? ? , ?? ?? ? ? ???? ??=1 = ? ? ??? ?? ??? ?? ? ? 2 + ?? ?? ??? ?? ? ? + ?? ?? + ?????? ?? ? * ?1 ? ?? ?? ??1 ?? * ?? ?? ? ???? ??=1 ?? ??=1 , ?? = 1,2, ? ,????(2)Startup cost can be expressed as mathematically:
?????? ?? ? = ? ?????? ?? ; ?????? ?????? ?? ? ?????? ?? ???? ? (?????? ?? + ?????? ?? ) ?????? ?? ; ?????? ?????? ?? ???? > (?????? ?? + ?????? ?? ) , ?? = 1,2, ? ,N?? & ? = 1,2, ? ,??(3)?????? ?? ? = ? ? ? ? ? ?? ?? + ?? ?? ? ? ? 1 ? ?? ??? ??,???? ? ?1 ?? ?? ? ? ? ? ? ? ? ? ? , ?? = 1,2, ? ????(4)a) Equality and Inequality Constraint a. Equality Constraint (Power Balance Constraint) For the power balance sum of generation of unit in h th hours is equal to total demand at h th hours and it is given by following equation.
?? ???????? ? + ? ?? ?? ? ???? ??=1 * ?? ?? ? = 0(5)6. b. Spinning Reserve Constraint
Due to the failure of the units or sudden change in load there is some reserve capacity of the plant or running plant run at the spinning capacity is known as spinning reserve capacity of the plant and it constraint is given by the following equation.
?? ???????? ? + ?? ? ? ? ?? ?? ?????? ???? ??=1 * ?? ?? ? ? 0(6)c. Thermal Constraint In the Thermal generation unit temperature is not constant, it is depending upon the load demand. So, it is take some time to return to online or in running condition. Maintenance of Thermal plant is manually controlled so maintenance needs at certain time limit. There are various thermal constraints as per follow. d. Minimum up and new down time constraints
?? ?? ?? = ? 1 ; ???? ?? ??,???? ??1 < ?? ?? ???? 0 ; ???? ?? ??,?????? ??1 < ?? ?? ???????? 0 ???? 1 ; ?????????????????(7)? Minimum Up Time If the units have been already shut down, then for restarting some time is required it is called Up Time and given by following equation.
?? ?? ???? (?) ? ?????? ??(8)? Minimum Down Time Times required for the shutdown of plant is called down time and it is given by following equation.
?? ?? ?????? (?) ? ?????? ??(9)e. Crew Constraint If a plant consists more than two units, they cannot be turned on at the same time because there are not enough crew members to attend both unit at same time while starting up. f. Maximum and Minimum Power Limits (Generation limit constraints) Every plant consists their maximum and minimum power generation limits and it is given by following equation.
?? ?? ?????? * ?? ?? ? ? ?? ?? ? ? ?? ?? ?????? * ?? ?? ? , ?? = 1,2 ? ????.(10)g. On/off line minimum level constraints
?? ?? ? = ?? ?? ?????? , ???? ?? ?? ??1 = 0 &?? ?? ? = 1,(11)?????? ?? ?? ? = 1 &?? ?? ?+1 = 0.
7. h. Generation ramp limit constraints
Where, NG is total number of generating units,?? ?? ? is the total power, U is the total units generated and ?? ???????? ? is the total demand.
V.
8. PVS Algorithm
Passing vehicle search (PVS) algorithm [77] is a meta-heuristics population based algorithm which mechanism is inspired by passing vehicles on two-lane rural high ways that was first described by Poonam Savsani, & Vimal Savsani in 2016.The passing maneuver on two-lane rural highways is one of the most significant yet complex and important driving tasks. This process, though, is relatively difficult to quantify, primarily because of the many stages involved and the lengthy section of road that typically is needed to complete the maneuver. Road capacity, safety, and level of service are all affected by the passing ability of faster vehicles, particularly on two-lane highways. The ability to pass is influenced by a variety of parameters including the volumes of through and opposing traffic; the speed differential between the passing and passed vehicles; the highway geometry, particularly available sight distance; and human factors such as driver-reaction times and gap acceptance characteristics. The goal is to provide reliable input information for the design process of two lane highways, which involves the need for passing sight distances. The existing passing model, used by the AASHTO policy, was developed some four decades ago; it assumes a single passing vehicle and a single passed vehicle, both passenger cars. In reality, as many as 25 percent or more of the passing maneuvers may be classified as multiple passing, in which more than one vehicle is overtaken. In addition, because trucks generally have lower speeds than cars, a considerable number of passing maneuvers occur when passenger cars overtake trucks. In this study, single and multiple passing's are analyzed and the necessary sight distances for adequate design of twolane rural highways are evaluated. The research is based on analysis of data collected by videotaping five tangent two-lane highway sections from high vantage points and one additional location where a helicopter hovered overhead. The components of the passing sight distance were evaluated on the basis of the measured distances that were necessary to complete the maneuvers safely [78].
The flow characteristics of a road cross-section are identified by time headway (TH) and vehicle speed (VS) distributions over time. Knowledge of both headway and speed distributions plays a significant role in several fields of traffic flow analysis and simulation [79]. In particular, we refer to operative analysis of road facilities in interrupted and uninterrupted flow conditions.
Studies on VS modeling have been published for many years (Gerlough and Huber (1976) [80]; Luttinen (1996) [81]; Luttinen (2001) [82]; Dey et al. (2006) [83]; Zou and Zhang (2011) [84]; Zou et al. (2012) [85]). Year 2017 F Fig. 4: Three vehicles passing mechanism on a two-lane-highways. Paul Warnshu is (1967) constructed a computer simulation that modeled each individual vehicle's behavior directly. This simulation was intended to serve as a tool helping develop a theoretical description of the interaction between the two lanes and how that interaction influences the traffic flow in each lane. The simulation was coded in Fortran IV, and it assumed that the two-lane road extends infinitely in both directions by using a two-lane circular track and does not have any restrictions on speed and passing. The inputs, the flow rate in each lane, the distribution of the desired speed, the initial ordering of vehicles, and the initial spacing of vehicles could be specified by users. Each vehicle, based on other assumptions, travels at a fixed desired speed except for the following or passing condition. Passing maneuvers in the simulation were governed by the rules specified in the paper [86]. A car that intends to pass another car may do so only if its leader has a relatively lower desired speed, the oncoming vehicle is far enough for the vehicle to complete pass and the gap in front of the passed vehicle is sufficient for the vehicle to return to the normal lane after passing. Several other constraints were also made, such as the determination of the safe distance ahead of the passed vehicle and to the first oncoming vehicle when the passing is completed, that a vehicle may pass only one vehicle at a time, and that a vehicle may be passed by only one vehicle at a time.
Y-V X-V A 1 a Z-V A 2 A 3 b X-V Y-V XV c1 a 1 Z-V b 1 Y-V Z-V X-V a 1 b 1 X-V Y-V Z-V XV c2 b 1 X-V Y-V Z-V XV c2 XV c3 a 1 =infinite Condition-2 Initial- Condition Condition-1 V 1 V 2 V 3 ©2017The mathematical model for three vehicles passing mechanism on a two-lane-high ways is shown in Step 2:Initialize the random generated populations and evaluate them for, i = 1, FE = 0, g = 1.
Step 3: Store the elite best solution and Select any two random populations k & l, k # l # i.
Step 4: Calculate distances (D10, D20, and D30) and velocities (V10, V20, and V30) of search agent X-V, Y-V, and Z-V respectively and Calculate velocity.
Step 5: Calculate distances a, b, A 1 , A 2 , and A 3 using following equation:
?? ???? ? = ?? ???? + ????????( ) * (?? ???? ? ?? ???? ), ?? ???? ? = ?? ???? + ????????( ) * ?? ?????? * (?? ???? ? ?? ???? ) andStep 6: Update the result if it is better than the previous result.
Step 7: Maintain diversity in the population by removing the duplicates as follows.
for k= 1 : 2: N (Population size)
if A k = A k+1 i = rand*(design variables)A k+1,I = lb i + rand*(ub i -lb i )
9. end if end for
Step 8: Repeat the mechanism until the termination condition are satisfied.
10. Stop.
A 1 , A 2 , A 3 -Distance from reference line V 1 , V 2 , V 3 -X-V, Y-V and Z-V vehicle velocities respectively.
A step wise procedure to implement PVS for the optimization of a given function is described in this section and PVS is explained with the aid of the Pseudo code in Fig. 5.
11. VI. Opposite Based Learning Techniques (OBLT)
Now a day, meta-heuristic algorithms are much popular as they are able to provide optimal solution to all most all types (nonlinear, non convex, discrete etc.) of engineering problems. As algorithms are population based so enables to provide improved solution with integration of powerful techniques. In this article, such a powerful technique named OBLT (Opposite based learning techniques) is integrated with existing proposed PVS algorithm. As the effectiveness of the solution of optimization algorithm is basically depends on the population initialization, as it can affect the quality solution as well as the convergence speed. As most of the optimization algorithms uses random guess to produce an initial population in the absence of primary information about the global best solution. However, such type of purely random guess based solutions have higher probability to visiting or revising unproductive areas of unknown search space that adversely affects the quality solution and convergence speed. To overcome such a difficulty OBLT is proposed [87] to ameliorate individual solution by taking into account the current population as well as its opposite population simultaneously.
In most of the population based algorithms uses these initial population as current best and then directional search towards optimal one that's really a more time-consuming method, but OBLT provides enough strength to proposed PVS algorithm to gain a better approximation for both current and opposite population at the same time, as it provide a solution which is more nearer solution from optimal based from starting by checking both solutions. This approach is not only used only for initial solution but also used for each solution in current population.
(P i ) = (? 1 , ? 2 , ? 3 ,?. ? t ) be t-dimensional vector, where ? i ? (X i , Y i ) & i=1, 2, 3?, t. So, opposite point is: ? i = (? 1 , ? 2 , ? 3 ??? t ) where ? i= X i + Y i -? iAfter opposite point definition, oppositional based optimization is expressed as:
Assume (P i ) = (? 1 , ? 2 , ? 3 ,?. ? t )? i = (? 1 , ? 2 , ? 3 ??? t ) is opposite of P i = (? 1 , ? 2 , ? 3 , ?. ? t ). So now working of OBLT is changed as ? (P i ) ? ? ( ? i ) then point P i is replaced by ? i . Similar approach is applied over each evaluated point simultaneously in order to move the search in a more closer to global best solution.
A step wise procedure to implement purposed Opposition based PVS algorithm is explained with the aid of the Flowchart inFig.6.
12. a) Quasi-OBLT (Q-OBLT)
Q-OBLT is primarily proposed by Rahnamayan et al. [88] to produce much better candidate solution by taking into account the current population as well as its quasi-opposite population simultaneously.
Assume ? ? [X, Y] where ? ? R (Real number) then its opposite number (?) and its quassioppositional number (? qo ) are expressed as :
? qo = rand*[(X+Y)/2, (X+Y-?)] Assume point (P) = (? 1 , ? 2 , ? 3 , ?.? t ) be t- dimensional vector, where ? i ? (X i , Y i ) & i=1, 2, 3?, t. So opposite point is: ? = (? 1 , ? 2 , ? 3 ??? t ) where ? 1= X i + Y i -? i then quasi-oppositeSolution is given by:
? qoi = rand*[(X i +Y i )/2, (X i +Y i -? i )] where P qoi = (? qo1 , ? qo2 , ? qo3 ,?. ? qot ) (17) b) Quasi-opposite based optimization (Q-OBO) Assume P i = (? 1 , ? 2 , ? 3 , ?.? t ) be a point in t-P qoi = (? qo1 , ? qo2 , ? qo3 ,?. ? qot ) is quasi-opposite of P i = (? 1 , ? 2 , ? 3 , ?.? t ).So now working of Q-OBO is changed as ? (Pi) ? ? (P qoi ) then point P i is replaced by P qoi . Similar approach is applied over each evaluated point simultaneously in order to move the search in a more closer to global best solution. ( ) ( )
13. VII. Numerical Results And Case Study
14. F8
De Joung (Shekel's Foxholes) ( ) ( ) For 10 generating unit system, 24-hour load demands are given in fig. 15 and for 5-unit, and 6-unit system 24hour load demands are given in fig. 16. The 10 generating unit system data and load demands are taken from [89]. The spinning reserve (SR) for all test units is considered 10% of the hourly load demand but for 10-unit system also considered 5% of the hourly load demand. The initial control parameters of proposed QOPVS method such as population size (no. of search agent), number of iterations, total trial runs etc. are given in Table 1. For the 20-unit, and 40-unit test system the initial 10-units were duplicated and the demand was multiplied by 2 and 4 respectively. A PVS algorithm with Year 2017 F complete state enumeration was also developed and used to solve the 10-unit problem. The solutions of the PVS and the QOPVS, for the 10-unit problem, are identical. In other test runs not reported here, the QOPVS provided solutions even better than the PVS with complete state enumeration. For the larger problem sets the QOPVS solutions were compared with the solutions produced by the PVS algorithm, as the time and capacity requirements of the PVS algorithm with complete state enumeration are prohibitive for problems of this scale. In order to avoid misleading results due to the heuristic nature of the PVS, 10 runs were made for each problem set, with each run starting with different random populations. For a specific problem set, the generation limit increasing with the number of units. A run was considered successful if it converged on a solution equal to or better than that of the PVS algorithm.
1 25 6 2 1 1 1 1 500 ? = = ? ? ? ? ? ? = + ? ? + ? ? ? ? ? ? ? j i ij i f x j x ai i i i i i i x b b x f x a b b x x = ? ? + ? ? = ? + + ? ? ? ? ? 4 [-5,5] 0.00030The population size was 30 in all runs for 10-unit test system and 60 for 20-unit & 40-unit test system. In general, when the population size increases, the number of generations required by the PVS to converge to the optimum solution decreases. On the other. hand, the CPU time required for the evaluation of a generation increases almost proportional with the population size. The population of 30 search agents was chosen, after several tests runs concerning populations of 10-100 search agents, because it was slightly more efficient (i.e. it was faster in reaching the same solution with equal probability).
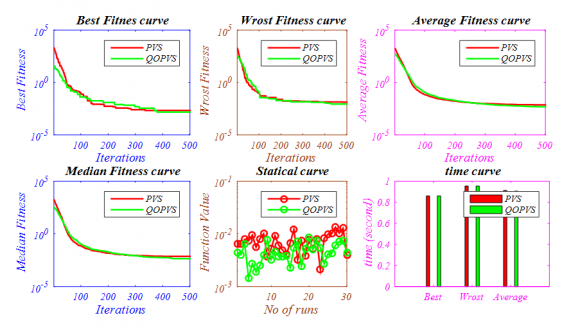
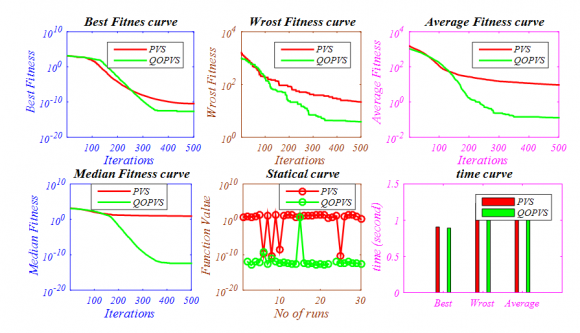
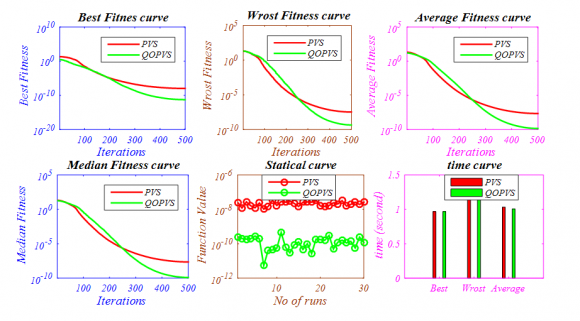
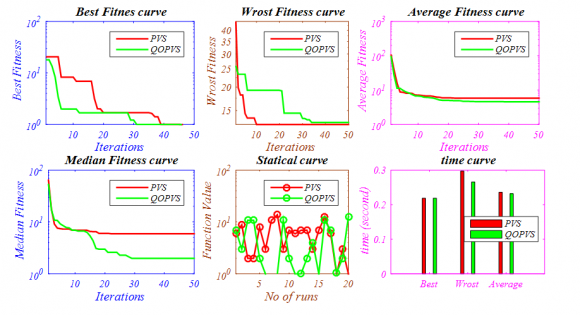
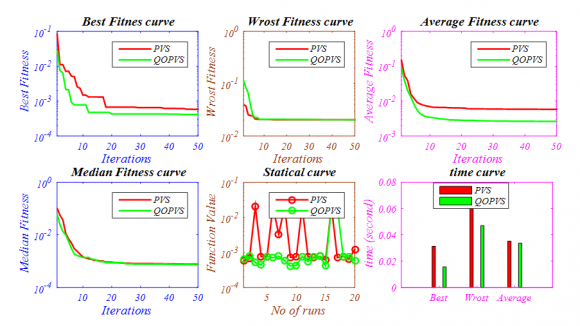
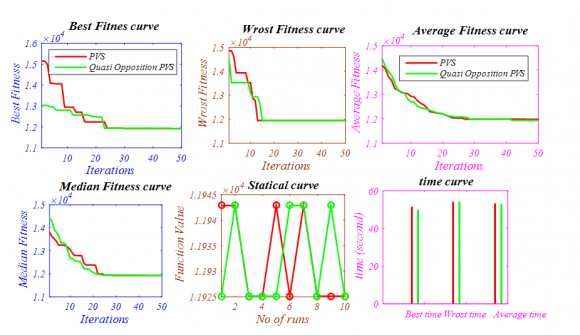
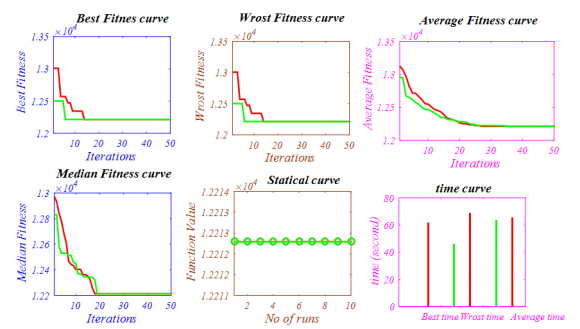
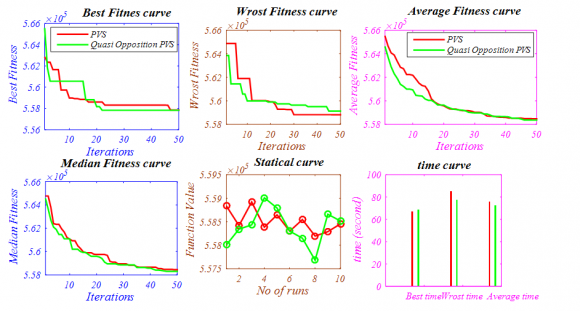
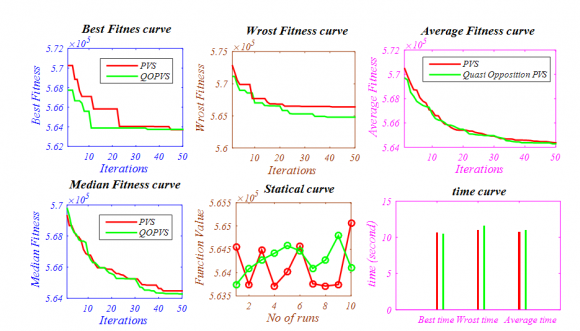
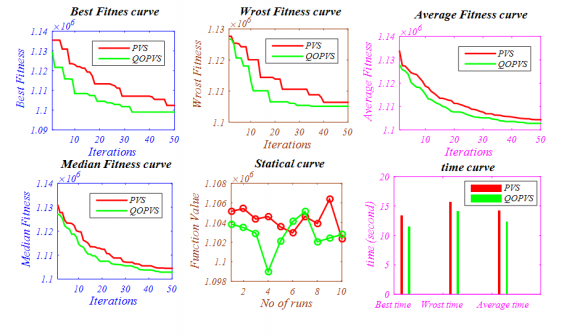
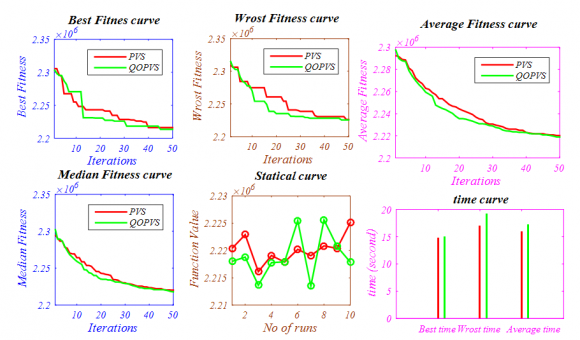
Optimal UC schedule of the 5-unit and 6-unit test system on 24-h scheduling horizon with one-hour interval considering 10% spinning reserve is shown in Table 4 and Table 6. The test results are shown in Table 5 and Table 7, for the QOPVS, all the Best, Average, Median, Worst and standard Deviation solutions produced are reported together with their difference as a percentage of the best solution. The optimized solution in terms of generation cost and time, the purposed QOPVS method give better result compare PVS method. Fig. 17and Fig. 18 shows the best fitness, worst fitness, average fitness of all vehicles, median fitness, statically and time curves of the proposed QOPVS method for 5unit and 6-unit system UC problem respectively. Optimal UC schedule of the 10-unit test system on 24-h scheduling horizon with one-hour interval considering 5% spinning reserve is shown in Table 8. For the 10-unit test system, all the best, average, median, worst and standard deviation solutions produced are reported in Table 9. Fig. 19 shows the best fitness, worst fitness, average fitness of all vehicles, median fitness, statically and time curves of the proposed QOPVS method for 10unit system UC problem. Optimal UC schedule of the 10-, 20-, and 40unit test system on 24-h scheduling horizon with onehour interval considering 10% spinning reserve is shown in Table 10, Table 12 and Table 13 respectively. For the 10-, 20-, and 40-unit test system, all the best, average, median, worst and standard deviation solutions produced are reported together in Table 11 and Table 14 respectively. As shown in Table 14, for large systems (more than 10 units), the QOPVS constantly outperforms the PVS unit commitment. The QOPVS best, average and worst time reported concerns CPU time on PC with Intel Core i3 of 4 GB RAM. The scaling of the QOPVS execution time is less compare other methods [72], [74]. Analysis of the results presented in Table 14 shows that the QOPVS execution time and generation cost increases in a quadratic way with the number of units to be committed. Fig. 20 to Fig. 22 shows the best fitness, worst fitness, average fitness of all vehicles, median fitness, statically and time curves of the proposed VIII.
15. Conclusion
In this article, QOPVS Algorithm solution to the single area Unit Commitment problem has been presented. It was necessary to enhance a standard PVS implementation with the addition of problem specific operators and the varying quality function technique in order to obtain satisfactory unit commitment solutions. The results show an improvement in the quality of solutions obtained compared with other methods result.
A basic advantage of the QOPVS solution is the flexibility it provides in modelling both time-dependent and coupling constraints. Another advantage is that QOPVS can be very easily converted to work on parallel computers. However, our results indicate that the difference between the worst and the best QOPVSprovided solution is very small. Another advantage of QOPVS-UC algorithms is their less execution time. The proposed QOPVS optimization technique is applied for simulated on various test systems with the number of units 5-unit, 6-unit, 10-unit, 20-unit, and 40-unit are considered for 24-hour load scheduling horizon. It is observed that performance of proposed QOPVS algorithm is much better than compare to standard PVS and other conventional and heuristics algorithm. Convergence of proposed QOPVS is faster than standard PVS.



| Scheduling ON/OFF status for each generating unit Differential Evolution (DE) for solving ELD problems with specialized constraint handling mechanisms. A Comparative Study on Heuristic Optimization Techniques with an Improved Coordinated Aggregation- | Allocation of power to be shared by each scheduled unit | ||
| Based PSO | |||
| Input characteristics | |||
| of generator | |||
| Input load profile | |||
| (24-hour demand) | |||
| Optimal ON/OFF Schedule, | |||
| Year 2017 | 1. Passing Vehicle Search Algorithm 2. Grey Wolf Algorithm | Optimal Dispatch of Power, Optimal Generation Cost, | |
| 52 | 3. Monarch Butterfly Optimization | Total Power Loss, | |
| 4. Moth Flame Optimizer | |||
| Global Journal of Researches in Engineering F ( ) Volume XVII Issue IV Version I | 5. Krill Heard Algorithm 6. Cuckoo Search (CS) algorithm | Total Power and Total Computational Time | |
| dimensional space. Assume ? (*) is fitness function |
| used to measure candidate fitness. So as define in |
| definition for opposition point |
| Rastrigin Function, Ackley's Function, De Joung |
| (Shekel's Foxholes), Kowalik's Function to verify the |
| robustness and effectiveness. The objective function, |
| dimension, range, and minimum value of objective |
| function of all benchmark test functions are given in |
| Firstly, The Proposed QOPVS optimization |
| technique is applied on various standard un-constraints |
| benchmark test functions such as Sphere, Schwefel |
| 2.22, Schwefel 1.2, Schwefel 2.21, Quartic Function, |
| Test System | Population Size (Search Agent No.) | Maximum No. of Iterations | Total Trial Runs |
| F1-F10 | 20 | 500 | 20 |
| 5-Unit System | 30 | 50 | 10 |
| 6-Unit System | 60 | 50 | 10 |
| 10-Unit System | 30 | 50 | 10 |
| 20-Unit System | 60 | 50 | 10 |
| 40-Unit System | 60 | 50 | 10 |
| No. | Function | Dim | Range | Fmin | ||
| n | ||||||
| F1 | Name Sphere | ( ) f x | ( ) x R x 2 * i = ? 1 i = | 10 | [ -100, 100] | |
| F2 | Schwefel 2.22 | |||||
| Year 2017 |
| 63 |
| Global Journal of Researches in Engineering ( ) Volume XVII Issue IV Version I F |
| Generation Cost | Time | ||||||
| Optimization Techniques | Best | Average Median Worst | SD | Best Average Worst | |||
| QOPVS [Proposed Technique] 11925.1 274 | 11935.7 714 | 11942. 8673 | 11942 .8673 | 8.69 07 | 51.5 53.0266 | 54.25 | |
| PVS [Proposed Technique] | 11928.1 654 | 11939.7 714 | 11940. 8673 | 11948 .6528 | 8.69 07 | 50.8 52.8215 | 55.5 |
| F |
| Generation Cost | Time | |||||
| Optimization Techniques | Best | Average Median Worst | SD | Best Average Worst | ||
| QOPVS [Proposed Technique] | 11925.1 274 | 11935.7 714 | 11942. 8673 | 11942 .8673 | 8.6907 51.5 53.0266 54.25 | |
| PVS [Proposed Technique] | 11928.1 654 | 11939.7 714 | 11940. 8673 | 11948 .6528 | 8.69 07 | 50.8 52.8215 55.5 |
| Generation Cost | Time | ||||||
| Optimization Techniques | |||||||
| Best | Average Median Worst SD | Best Average Worst | |||||
| QOPVS [Proposed Technique] 557680 .714 | 558388 .3938 | 55838 7.4718 | 5590 08.914 | 368. 1285 | 66.84 38 | 76.0141 84.93 75 | |
| PVS [Proposed Technique] | 557843 .339 | 558391 .0417 | 55845 7.4866 | 5588 11.059 | 262. 768 | 87. 875 | 94.5922 106.0 938 |
| Hour U-1 | U-2 | U-3 | U-4 | U-5 | U-6 | U-7 | U-8 | U-9 U-10 | SR | ||
| 1 | 455 | 245 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 70 |
| 2 | 455 | 295 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 75 |
| 3 | 455 | 370 | 0 | 0 | 0 | 0 | 25 | 0 | 0 | 0 | 85 |
| 4 | 455 | 450 | 0 | 0 | 0 | 20 | 25 | 0 | 0 | 0 | 95 |
| 5 | 455 | 370 | 0 | 130 | 0 | 20 | 25 | 0 | 0 | 0 | 100 |
| 6 | 455 | 455 | 0 | 130 | 40 | 20 | 0 | 0 | 0 | 0 | 110 |
| 7 | 455 | 410 | 130 | 130 | 25 | 0 | 0 | 0 | 0 | 0 | 115 |
| 8 | 455 | 455 | 130 | 130 | 30 | 0 | 0 | 0 | 0 | 0 | 120 |
| 9 | 455 | 455 | 130 | 130 | 95 | 0 | 25 | 10 | 0 | 0 | 130 |
| 10 | 455 | 455 | 130 | 130 | 162 | 33 | 25 | 10 | 0 | 0 | 140 |
| 11 | 455 | 455 | 130 | 130 | 162 | 73 | 25 | 10 | 10 | 0 | 145 |
| 12 | 455 | 455 | 130 | 130 | 162 | 80 | 25 | 43 | 10 | 10 | 150 |
| 13 | 455 | 455 | 130 | 130 | 162 | 33 | 25 | 10 | 0 | 0 | 140 |
| 14 | 455 | 455 | 130 | 130 | 85 | 20 | 25 | 0 | 0 | 0 | 130 |
| 15 | 455 | 455 | 130 | 130 | 30 | 0 | 0 | 0 | 0 | 0 | 120 |
| 16 | 455 | 310 | 130 | 130 | 25 | 0 | 0 | 0 | 0 | 0 | 105 |
| 17 | 455 | 260 | 130 | 130 | 25 | 0 | 0 | 0 | 0 | 0 | 100 |
| 18 | 455 | 360 | 130 | 130 | 25 | 0 | 0 | 0 | 0 | 0 | 110 |
| 19 | 455 | 455 | 130 | 130 | 30 | 0 | 0 | 0 | 0 | 0 | 120 |
| 20 | 455 | 455 | 130 | 130 | 162 | 33 | 25 | 10 | 0 | 0 | 140 |
| 21 | 455 | 455 | 130 | 130 | 85 | 20 | 25 | 0 | 0 | 0 | 130 |
| 22 | 455 | 455 | 0 | 0 | 145 | 20 | 25 | 0 | 0 | 0 | 110 |
| 23 | 455 | 420 | 0 | 0 | 25 | 0 | 0 | 0 | 0 | 0 | 90 |
| 24 | 455 | 345 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 80 |
| U = Generating Unit | |||||||||||
| S. No. Optimization Techniques | Best | Generation Cost Average Median Worst | SD | Time Best Average Worst | |||||
| 1 QOPVS [Proposed Technique] | 563712. 108 | 564135. 8193 | 563887 .333 | 56506 6.888 | 466. 4197 | 7.8 969 | 8.8317 | 10.00 94 | |
| 2 | PVS [Proposed Technique] | 563730. 418 | 564415. 2063 | 564475 .5893 | 56506 9.753 | 464. 6139 | 9.0 047 | 10.4658 | 11.00 63 |
| No. of | Optimization | Generation Cost | Time | |||
| Units | Techniques | Best | Average | Median | Worst | SD Best Average Worst |
| 10-Unit System | QOPVS method | 1099001.745 1102777.5224 1102842.70 1105124.19 1559.2 8.3281 9.8477 11.423 | ||||
| PVS method 1101678.778 1103797.554 1104266.18 1105512.67 1220.5 13.432 14.2259 15.715 | ||||||
| 20-Unit System | QOPVS method | 563712.108 564135.8193 563887.333 565066.888 466.41 7.8969 8.8317 10.009 | ||||
| PVS method 563730.418 564415.2063 564475.5893 565069.753 464.61 9.0047 10.4658 11.006 | ||||||
| 40-Unit System | QOPVS method | 2213498.258 2218934 | ||||