1. I. Introduction
s Mobile Robots are becoming popular and their wide range of probable applications are being explored, more and more researches are being carried out to eradicate the incapability of Mobile Robots and make them suitable for different situations and applications. Mobile Robots can have multidimensional functionalities or might be used in various different applications. Different application will demand different application specific functionalities, however one of the most basic and important functionality and fundamental requirement of all Mobile Robots would be to safely navigate from one location to another and then perform its respective tasks. Thus, one of the key fields of research now-a-days has been the path planning of mobile robots, which would ensure the Mobile Robots to safely navigate from its initial location to its final location. However, the word "SAFELY" is of great significance as Author ? ? ?: University of Siegen/Automatic Control Engineering, D-57068 Siegen, Germany. e-mails: [email protected], asif.mahfuz@ student.uni-siegen.de, [email protected] it encompasses complex collision avoidance strategies and many other complex algorithms for various features. Therefore, the task of Mobile Robots to successfully navigate through the environments depends largely upon how much effective and flexible path planning and collision avoidance algorithm it uses.
On the other hand, a parallel field of interest for many researchers around the world has been the understanding of the human mind and its intelligence. This is because unraveling the mystery of human intelligence, which encompasses complex reasoning, problem solving, decision making and knowledge processing, can be the panacea to the sea of complex problems which are hindering the technological advances. Introducing perceptual judgement, intelligent decision making or experience based learning to robots, vehicle or any other devices can give them the intelligence to overcome complex hurdles. The aim of this work is to mimic human perceptual judgment with a Fuzzy Inference System in Mobile Robots for a robust collision avoidance algorithm.
2. II. Problem Formulation
The current work is an improvement of the approach proposed in the work [1]. The scope of the work is strictly restricted to environments with known static obstacles and more than one (two) Mobile Robots. In addition, the work is based on the following assumptions, firstly, a continuous metric map of the environment is available to the Mobile Robots, and secondly, each Mobile Robots have the exact location information of itself and the other Mobile Robot. This work of motion planning and control basically comprised of two phases. In the first phase, individual multi-objective optimized paths were generated with specific cost functions for individual Mobile Robots the consideration of the other Mobile Robots in the environment, with.
Modified Genetic Algorithm with A* [2]. Although, neglecting the other Mobile Robots reduced complexity of the task of individual path planning for the Mobile Robots, but it generated paths which would intersect with the paths of the other Mobile Robots. This as a result increased the probability of collisions. Thus, if such a situation occurs, an algorithm was needed to avoid collisions of the Mobile Robots. The second phase of the work therefore, was to design a method to avoid such collisions. In the second phase, a Fuzzy Inference System was designed to safely avoid the collision by slowing down the low prioritized Mobile Robot. Although this approach provided successful outcomes and was appropriate for some applications, but it also had an inflexibility. In worst cases, if the prioritized robot breaks down in the intersection point for any technical or other problems, the second, low prioritized Mobile Robot, will also stop keeping a safe distance from the other Mobile Robot and does not have the intelligence to drive around the broken Mobile Robot to avoid the collision and complete its due tasks. Fig. 1 : A) "Situation 1" where both Mobile Robots approach the intersection at the same time and B) "Situation 2" where the prioritized Mobile Robot breaks down in its path.
Figure 1 above depicts the two situations where the Mobile Robots have possibilities of collision. The earlier designed approach was able to tackle "Situation 1" and both Mobile Robots can effectively carry out their respective tasks. However, in "Situation 2" the low prioritized Mobile Robot would stop keeping a safe distance from the prioritized Mobile Robot, but was unable to independently carry out its task unless and until the prioritized Mobile Robot was moved out of its track. This inflexibility demanded an improved strategy, which would help the Mobile Robot to avoid collisions and as well as overcome such situations and carry out its task independent of the state of the prioritized Mobile Robot. The alternative design approach proposed in this paper, is the implementation of mimicked human perceptual judgments with the help of a Fuzzy Inference System for collision avoidance. However, to facilitate the mapping of human mind reasoning in to computation processes would require the understanding of step-bystep formulation of human perceptual judgments. So, to apprehend the design process and the design, the next section gives a narrowed down and general description of human path planning and perceptual judgements specific to our application. As soon as people make up their mind, the human mind takes into account, its current position, destination location, knowledge and experience of the place and curves out a path to reach the destination location. So, if the situation remains as it was planned, the preplanned path is taken to reach the destination location. However, if there are any problems or obstacles in the planned path human mind based on perceptual judgements, make instantaneous decisions to take an alternative route or to avoid the obstacle. Since the focus of this is based on collision avoidance with dynamic obstacles, a deeper effort is taken to understand how human perceives an object to be an obstacle in its way.
3. III. Understanding of the Human Mind
Firstly, the simplest case can be an object stranded on the preplanned path, which has to be avoided. Second case can be a moving object in the proximity of human vision. As soon as the moving object is noticed, based on individual perception and not precise or accurate data, human mind decides about the proximity of the object, in other words their distance Although the process of decision making and perceptual judgment might seem very simple, as human use it instinctively, but to understand the process behind it can be equally complex and hectic. Thus, to decrease the degree of complexity in understanding the human mind, the scope of human intelligence is narrowed down to the interpretation of perceptual judgement within our specific application. Therefore, in other word, we would try to investigate deeply how humans plan their path to safely move from one location to another. Figure 2 shows a simple block diagram to describe the process of how human mind works when people make up their mind to go from one location to another. from the object is defined with perceptual judgment as, for instance, far, very far, near or very near etc. However, this degree of perceptual judgment is unique and subjective to individuals. Simultaneously, the human mind also figures out if the object is approaching or moving away. And if it is approaching, again based on perception, human mind decides how fast or slow it is moving. Based on such perceptual judgments (for the case of simplicity, the measure of the individual's physical ability has been ignored to reach the perceptual judgments), the human mind finds out an appropriate way of avoiding the collision with object. And once the object is avoided, and if there are no further distractions, the individual carries on following the preplanned path.
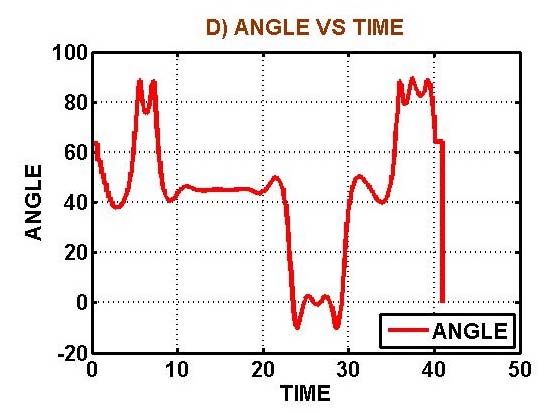
The proposed approach is designed keeping an analogy to the human mind. Figure 3 As illustrated in the block diagram above, an initial set of parameters such as, speed and angle are calculated for the Mobile Robot based on the preplanned path and forwarded as the input to the Motion Controller. However, these are not the only inputs to the Motion Controller, based on the perceptual situation of the obstacle robot, an offset to the angle is also calculated by the Fuzzy Inference System and forwarded as an input to the controller. Therefore, the offset, generated by the Fuzzy Inference System, acts as the analogous instantaneous decision for the Mobile Robots to deviate from its original preplanned path and take an alternative way to avoid the solution. The proceeding section describes in details the design of the Fuzzy Inference System and how it calculates the offset value.
4. IV. Fuzzy Inference System
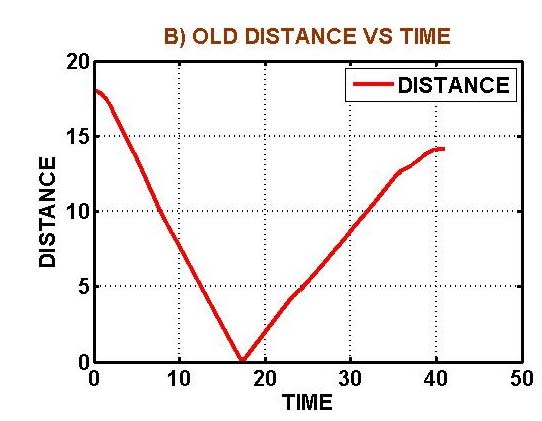
The Fuzzy Inference System designed, comprises of four inputs and one output. The inputs are Distance (distance between the two robots), CD (change in distance between the two robots), S (deviation from the preplanned path), and CS (change in deviation), and the output is Offset (amount of angle needed to be changed). As already depicted in Figure 5, the distance between the two robots are calculated at each time instants. The figure also gives an idea that the distance between the two Mobile Robots changes as the Mobile Robots move along their planned path. This change is calculated simultaneously and forwarded to the FIS as an input. This particular input helps the Mobile Robot to perceive whether, the other Mobile Robot (Robot 2) is approaching or retreating it. When CD is negative, the Mobile Robot (Robot 1) perceives the other Mobile Robot (Robot 2) to be approaching it, and on the other hand when CD is positive, the Mobile Robot (Robot 1) perceives the other Mobile Robot (Robot 2) to be retreating it. In addition, the two other inputs S and CSare also calculated in a similar way. The input S is the deviation of its current position from the planned position. This helps the particular Mobile Robot to perceive, how far it has currently deviated from its planned path. Finally the input CS helps the Mobile Robot to perceive, whether it is currently moving away or approaching towards its planned path. These four inputs of the FIS altogether, contributes in perceiving the current situation around the Mobile Robot and thus, based on the perceptual judgment, it produces an output OFFSET. The output as the name suggests, is the offset which is added to the angle calculated and thus helping the Mobile Robot to deviate from or move towards the planned path. The following figures illustrate the universe of discourse of the inputs Distance, CD, S and CS respectively. The perception of Human being is basically the interpretation of a situation and each rule above define a particular situation and a judgment or output for it and in the process help to implement the concept of perception. There are altogether fifteen rules, which relates the input membership functions to the output membership functions, depicting different situations and their corresponding output. The figure 10 below illustrates the universe of discourse for the output Offset. The proceeding section, gives the detailed results based on the simulation of the two situations discussed above and thus will verify the credibility of the proposed design.
5. V. Simulation Results
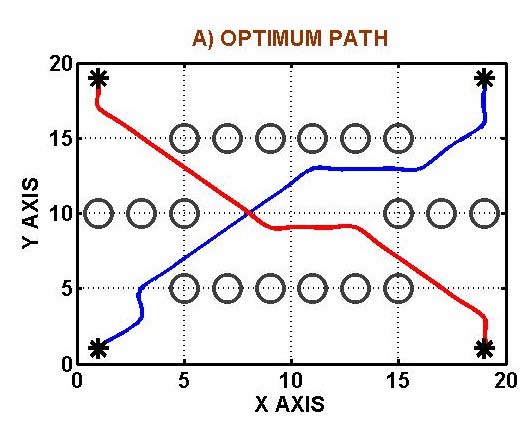
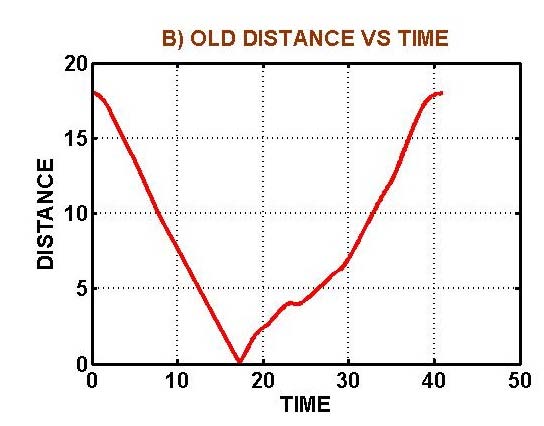
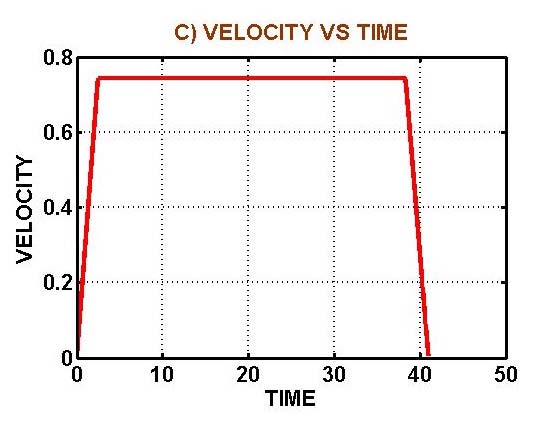
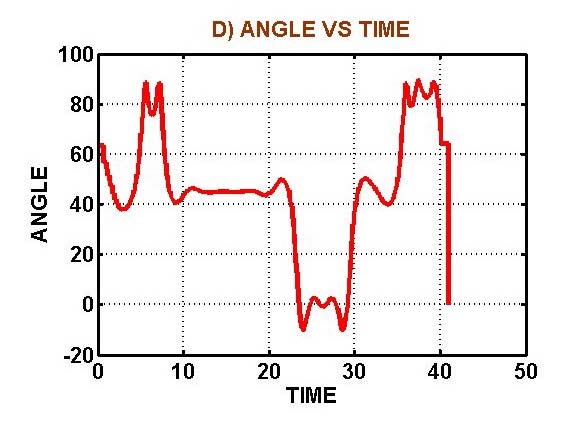
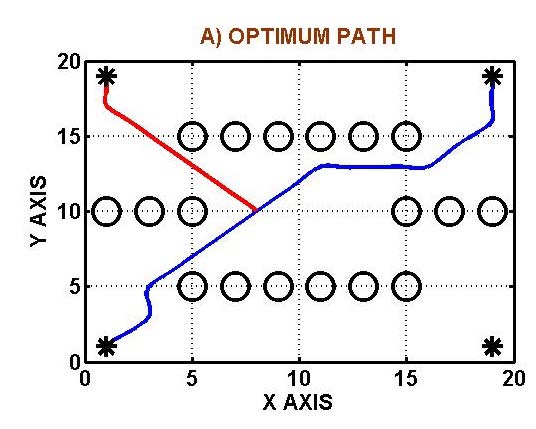
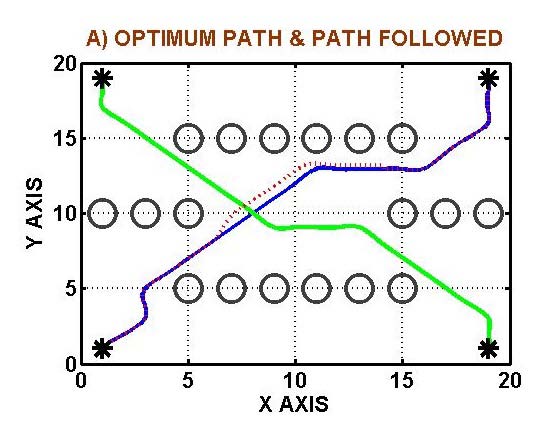
To carry out the validation of the entire design a simulation based on MATLAB in a 2D environment was carried out. The environment consisted of known static obstacles which represents a known industrial environment and two Mobile Robots which are to travel from their initial locations to their final locations. To verify the flexibility of the entire design, similar simulations were carried out in different maps. However, the results provided in this particular paper are from one of the maps on which the design was simulated. Figure 11 Figure 13 and Figure 14 depict the change in trajectory followed between the initial planning and the actual path followed by the Mobile Robot. The changes are due to the instantaneous perceptual judgement made by the Mobile Robot due to the presence of another Mobile Robot in its proximity. Figure 13 and Figure 14 A) particularly show the path taken by Mobile Robot 1, in red dots, to avoid collision with Mobile Robot 2. Figure 13 and Figure 14 B) show that the distance between the two robots do not become zero, which in turn assure that the robots have maintained a safe distance between them to avoid collisions. Figure 13 and Figure 14 C) show the speed profile, which show an increase in time for the completion of task. This is particularly due to the increase in distance travelled compared to the travelling distance of the planned path. And finally, Figure 13 and Figure 14 Figure 15 and Figure 16 show the X and Y coordinates of both the Mobile Robots for Situation 1 and Situation 2 respectively. In Figure 15 and Figure 16 coordinates become equal at different time to when the Y coordinates become equal. Therefore from the above observation, it can be further deduced that the position of the Mobile Robots do not intersect with each other and hence do not collide. And so from the above results it can be concluded the design approach successfully meets its desired requirements.
6. VI. Conclusion and Suggestion for
Future Work
Collision Avoidance being one of the fundamental problems for Mobile Robots, this paper tries to address this problem and also provide a novel solution of tackling this problems. A collision avoidance mechanism, designed with Fuzzy Inference System and based on the idea of mimicking human perception is being presented in this paper. The scope of this work is particularly intended for Mobile Robots working within structured, known environments with known static or dynamic obstacles. In order to verify the credibility of the design, simulations were carried out in a 2D environment in two different situations. The results from situation one, clearly depicts that both the Mobile Robots were able to successfully avoid collision in both the situations and complete their respective tasks. Whereas, the results from the second situation depicts, that, despite one of the Mobile Robot-2 was stranded in the path of the other Mobile Robot-1, Mobile Robot-1 could still avoid collision and complete its tasks. And so, it can be concluded, that the design perfectly overcomes the problem of collision situations defined in this paper. As future work, this work can be extended: 1) To develop the FIS design to give better responses in terms of getting back to its path once the collision is avoided. 2) To change, add or alter the input parameters of the FIS to improve the results of perceptual judgment. 3) To solve the problem of collision avoidance of Mobile Robots with unknown dynamic or static obstacles with in the environment.