1. Introduction
a colonne d'absorption est une unité de séparation physico-chimique largement utilisée en chimie et en biologie. Il s'agit en général d'un tube dans lequel on passe un ou plusieurs mélanges gazeux et qui permet de séparer un ou plusieurs composés du mélange principal. Elle est largement utilisée pour la séparation des gaz acides (CO 2 , H 2 S) du gaz naturel.
Le modèle de la colonne d'absorption industrielle présenté dans ce papier est un modèle dynamique qui consiste en un ensemble d'équations non linéaires aux dérivées partielles obtenu à partir de considérations sur les bilans de matière du CO 2 et du MDEA dans les phases gazeuse et liquide [1,2], il prend en compte le gradient thermique le long de la colonne d'absorption. Le bilan énergétique de la colonne industrielle est également posé.
Quelques études ont été publiées sur la modélisation et la commande de la colonne d'absorption. Crosby and Durbin [3] étudient les performances d'un régulateur d'état. Roffel [4] développe un régulateur sous optimal avec contraintes d'état. Darwish and Fantin [5] utilisent la commande décentralisée avec placement de pôles. Petrovsky [6] développe un régulateur PI multivariable. Najim [7,8] développe un régulateur auto-ajustable dans le cas de l'absorption du CO 2 par une solution de diéthanolamine. Il reprendra le problème par la suite avec une commande prédictive [9].
Peu d'études ont par contre été publiées concernant la modélisation et la simulation de l'absorption du CO 2 par une solution aqueuses de MDEA ou de MEA en milieu industriel [10][11][12]. Pour le modèle développé dans notre étude, il nous a semblé intéressant de considérer les réseaux de neurones pour la commande de la colonne car elle permet d'obtenir de bonnes performances pour des processus à dynamique complexe. Nous développerons en première étape une régulation PID pour comparer les performances des techniques de régulation classiques avec celles de la commande par réseaux de neurones.
2. II.
3. Modelisation et Simulation en Boucle Ouverte de la Colonne Industrielle
La colonne d'absorption présentée ici se situe à Khrechba et fait partie du projet In Salah Gaz, elle permet de prélever du CO 2 du gaz naturel en utilisant une solution aqueuse de methydiéthanolamine (MDEA) comme liquide de lavage. Elle est du type colonne à garnissage mesurant 8 mètre de hauteur et 4 m de diamètre. Le garnissage disposé en vrac est du type anneaux de Pall et est destiné à améliorer la surface de contact entre phases. Pour une meilleure élimination du CO 2 du mélange gazeux, le liquide de lavage (eau+ MDEA) circule à contre courant du flux de gaz. La pression et la température de travail sont respectivement de 71.5 bar et 55°C [2].
Lors du contact entre phase liquide et gazeuse sur la surface des anneaux de Pall, le CO 2 passe de la phase gazeuse vers la phase liquide. Cette diffusion est accélérée par réaction chimique du CO 2 avec la MDEA dans la phase liquide. Le débit de MDEA et la concentration du CO 2 en sortie dans le gaz naturel sont respectivement sélectionnés comme variables de commande et de sortie.
4. Motsclés: colonned'absorption; modélisation; methydiéthanolamine (MDEA); régulation pid; réseaux de neurones, commande non linéaire prédictive neuronale (nnpc). a) Equations Du Modèle
Dans le but de simplifier le modèle, nous avons adopté les hypothèses suivantes [2,13]:
? Il n'y a pas de résistance en phase gazeuse Quantité de soluté à l'entrée z = quantité de soluté à la sortie (z+dz) + quantité de soluté transféré de la phase liquide à la phase gazeuse + accumulation. Ce qui donne :
(1) où G (m 3 /s) est le débit vol umique du gaz, le flux de CO 2 transféré de la phase gazeuse vers la phase liquide, S la section de la colonne et C Ag (mol/m 3 ) la concentration du CO 2 dans le gaz. Soit UG=G/S (m/s) la vitesse moyenne d'écoulement du gaz, on obtient alors :
(2) La réaction chimique entre le CO 2 et le MDEA est [10][11][12]:
(3) Où k est la constante de la vitesse de réaction [14,15]: (5) C AL est la concentration du CO 2 dans la phase liquide et C BL la concentration du MEA dans la phase liquide. Le bilan de matière pour le CO 2 dans la phase liquide donne finalement: (6) Ce qui signifie que la totalité du CO 2 transféré dans la phase liquide réagit avec le MDEA.
Le bilan de matière pour le MDEA dans la phase liquide donne : La procédure pour calculer le flux ? est donnée en [2] d'après [14][15][16].
En dernier lieu, nous considérons les conditions aux limites qui sont pour la phase gazeuse la concentration du CO 2 en bas de la colonne C Age et pour la phase liquide la concentration du MDEA en haut de la colonne C BLe . (10) La réaction au sein de la colonne industrielle induit un fort dégagement de chaleur et l'apparition d'un La vitesse de réaction r A a la forme suivante [14,15]:
dz dt dC S dz S C G C G Ag dz z Ag z Ag + + = + ? ) ( ) ( ? dt dC dz dC U Ag Ag g ? = + ? ? + + ? + + 3 4 2 1 2 3 2 1 2 HCO NCH R R O H NCH R R CO ?? = 2,9610 5 exp( ? 5332 .8 ?? ) ] [ BL AL C kC = ? dz dt dC S dz S C C k C L C L Bl Bl Al dz z Bl z Bl ? ? = + ] [ ) ( ) ( dt dC dz dC U Bl Bl l = ? ? ? ? ? ? ? ? ? ? ? = ? ? ? ? ? ? = + ? ? t C z C U t C z C U BL BL L Ag Ag g ? ? ? ? ? ? ? = = = = BLe h z BL Age z Ag C C C C 0 © 2015 Global Journals Inc. (US) Global Journal of Researches in Engineering ( ) Volum(4) BL AL A C C k r =gradient de température tout au long de la colonne ; la variation de température est d'environ 5°C entre l'entrée et la sortie de la colonne, ce qui nous amène à établir un bilan énergétique permettant de décrire l'évolution de la température et son effet sur les différentes concentrations le long de la colonne [16] : C i g : la concentration en phase gazeuse à l'interface (mol/m 3 ) C i l : la concentration en phase liquide à l'interface (mol/m 3 ) cp i g : Chaleur spécifique dans la phase gazeuse à l'interface (J/mol.K) h g/l : coefficient de transfert de chaleur (convection)(J/m 2 .K.s) T l : température du liquide (K) T g : température du gaz (K) Î?"H r : l'enthalpie de la réaction (J/mol) cp i l : la chaleur spécifique dans la phase liquide à l'interface (J/mol.K)
On prend finalement en compte les conditions aux limites pour la température qui sont les températures respectives du gaz et du liquide en entrée de la colonne.
(12)
5. b) Validation du modèle
Un test a pu être effectué sur notre colonne d'absorption industrielle pour comparer la concentration du CO 2 en sortie donnée par le modèle avec celle du système et ce pour une variation de l'entrée du type échelon de 10 t/h. Les données ont pu être recueillies sur un horizon de temps de 6800 secondes. Les résultats sont groupés dans la figure 2 où on représente respectivement, les débits de MDEA, de gaz et les concentrations du CO 2 en sortie de la colonne et celles données par le modèle [2].
On note que la dynamique des concentrations de CO 2 sortie de la colonne obtenue théoriquement agrée avec les résultats expérimentaux.
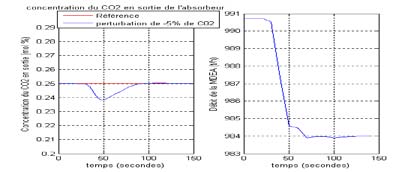
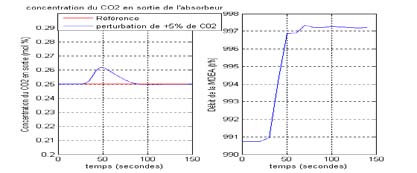
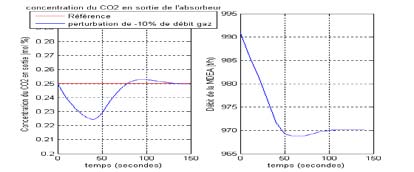
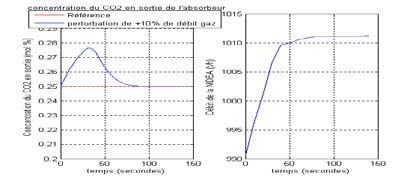
6. c) Simulation en boucle ouverte de la colonne industrielle
En considérant les équations ( 2) et ( 8), le modèle dynamique de la colonne d'absorption est un système aux paramètres répartis non linéaires. Les résultants de la simulation en boucle ouverte sont présentés en figures 3 et 4.
( Les résultats obtenus en simulation sont satisfaisants, le régulateur PID annule l'erreur en régime permanent et assure une réponse rapide grâce à l'action dérivée. Le système présente en régulation un certain comportement asymétrique dû a la forte non linéarité de la sortie par rapport à la commande choisie qui est le débit du liquide de lavage.
( ) [ ] ? ? ? ? ? ? ? ? ? ? ? = ? ? + ? ? ? ? ? = ? ? ? ? ? ? ? + ? ? ? ? t T T T a.h r Î?"H C cp z T U t T C cp T T a.h z T U l g l l g A r i i l i l l L g i i g i g g l l g g g 1 ? ? ? ? ? ? ? = ? ? = = ? ? = = = = = 0 0 0 0 h z g le h z l z l ge z g z T , T T z T ,)IV.
7. Commande par Reseaux de Neurones de la Colonne D'absorption Industrielle
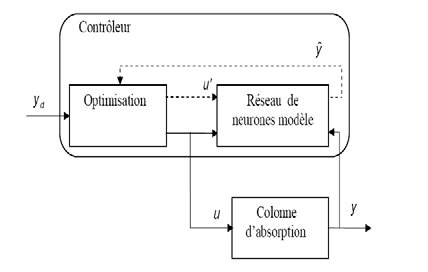
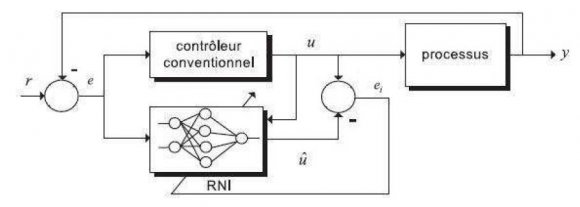
Les réseaux de neurones artificiels (RNA) sont des approximateurs universels de fonctions et permettent ainsi d'approcher n'importe quelle fonction non linéaire. Cette propriété motive leur utilisation pour la réalisation de commandes non linéaires par identification d'un modèle donné. . Nous envisageons dans notre étude un modèle général pour la synthèse de la commande non linéaire prédictive neuronale (NNPC) [18]- [19].
8. Commande non linéaire prédictive neuronale (NNPC)
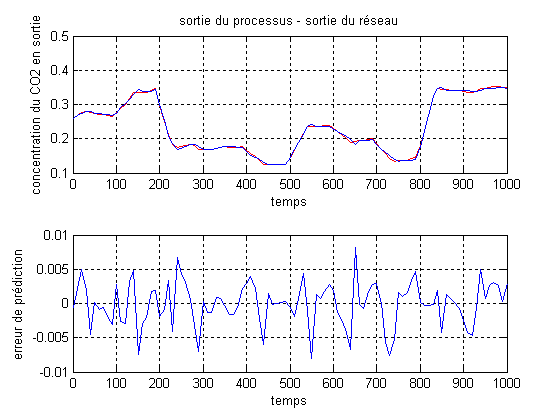
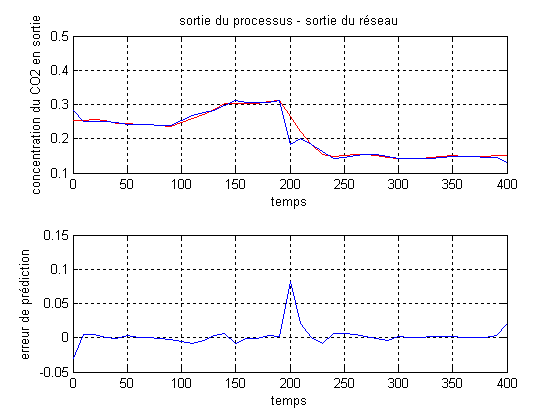
Nous prenons pour la commande NNPC une structure d'identification simple série-parallèle. Le réseau de neurones est choisi en essayant de minimiser l'erreur de rétropropagation du gradient. Après plusieurs essais, notre choix s'est arrêté sur un réseau à quatre entrées u(k),u(k-1),y(k), y(k-1) et une seule couche cachée à 15 neurones. L'apprentissage de notre réseau critère de performance. Le critère J est minimisé en utilisant un algorithme d'optimisation itératif en général l'algorithme BFGS qui est une méthode quasi Newton [18,22]. Le schéma de la figure 9 A cause des erreurs de modélisation on a normalement une erreur en régime permanent. Pour remédier à ce problème, on a introduit un régulateur PI sur lequel on commute dès que la sortie approche le voisinage de la consigne (10%) (figure 13). Toutes fois la réponse du système présente un comportement asymétrique pour les perturbations sur le débit gaz. V.
? ? = = ? + ? ? ? + ? + + ? + = 2 1 1 2 2 ) 2 ( ) 1 ( ) ( ) ( N N j N j d u j t u j t u j t y j t y J ? [ ] T u N t u t u t U ) 1 ( .... .......... ) ( ) ( ? + ? ? = ?9. Conclusion
Les simulations montrent que nous obtenons des performances satisfaisantes avec les deux techniques de réglage que ce soit pour les échelons de perturbation sur la concentration du CO 2 ou sur le débit de gaz. Il faut noter que la régulation PID donne de meilleurs temps de réponse que la commande neuronale du fait de sa simplicité.


| 0.22 | |||||||||||||||||||||
| sortie systeme bruitée | |||||||||||||||||||||
| [mol%] | 0.2 | sortie modele | |||||||||||||||||||
| Cgs | 0.18 | ||||||||||||||||||||
| 0.16 | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 7000 | |||||||||||||
| erreur de prediction | |||||||||||||||||||||
| 0.01 | |||||||||||||||||||||
| erreur [mol%] | -0.005 0 0.005 | ||||||||||||||||||||
| -0.01 | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 7000 | |||||||||||||
| temps [sec] | |||||||||||||||||||||
| Year 2015 | |||||||||||||||||||||
| 37 | |||||||||||||||||||||
| 0.252 | |||||||||||||||||||||
| 0.25 | |||||||||||||||||||||
| T | T | du CO2 en sortie (mole %) | 0.242 0.244 0.246 0.248 | ||||||||||||||||||
| Concentration | 0.238 0.24 | ||||||||||||||||||||
| 0.236 | |||||||||||||||||||||
| 0.234 | 0 | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 | |||||||||||
| temps (secondes) | |||||||||||||||||||||
| 0.27 | |||||||||||||||||||||
| 0.268 | |||||||||||||||||||||
| Concentration du CO2 en sortie (mole %) | 0.254 0.256 0.258 0.26 0.262 0.264 0.266 | ||||||||||||||||||||
| 0.252 | |||||||||||||||||||||
| 0.25 | 0 | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 | |||||||||||
| temps (secondes) | |||||||||||||||||||||
| debit MDEA [ton/h] | 1000 1020 1040 | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 7000 | ||||||||||||
| temps[sec] | |||||||||||||||||||||
| Gaz [ton/h] | 415 420 | ||||||||||||||||||||
| debit | 410 | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 7000 | ||||||||||||
| temps[sec] | |||||||||||||||||||||
| [mol%] | 0.2 | ||||||||||||||||||||
| Cgs | |||||||||||||||||||||
| 0.15 | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 7000 | |||||||||||||
| temps[sec] | |||||||||||||||||||||
| © 20 15 Global Journals Inc. (US) | |||||||||||||||||||||
| 0.265 | 0.35 | |||||||||||||||||||
| Concentration du CO2 en (%) | 0.245 0.25 0.255 0.26 | Réf Rég Nnpc+PI | Concentration du CO2 en (%) | 0.2 0.25 0.3 | Réf Rég Nnpc+PI | |||||||||||||||
| 0.24 | 0 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 0 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | ||
| temps (secondes) | temps (secondes) | |||||||||||||||||||
| 1020 | 1050 | |||||||||||||||||||
| Débit de la MDEA (t/h) | 1014 1016 1018 | 950 1000 | ||||||||||||||||||
| 1012 | 0 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 900 | 0 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | |
| temps (secondes) | temps (secondes) |